Robótica
‘Robô budista’ desenvolvido no Brasil enriquece experiência em museus coreanos
Protótipo, que interage com usuários por meio de movimentos sutis, reconhecimento de gestos, fala e música gerada por inteligência artificial, é baseado em escultura do século 7, considerada “tesouro nacional” da Coreia
Robótica
‘Robô budista’ desenvolvido no Brasil enriquece experiência em museus coreanos
Protótipo, que interage com usuários por meio de movimentos sutis, reconhecimento de gestos, fala e música gerada por inteligência artificial, é baseado em escultura do século 7, considerada “tesouro nacional” da Coreia
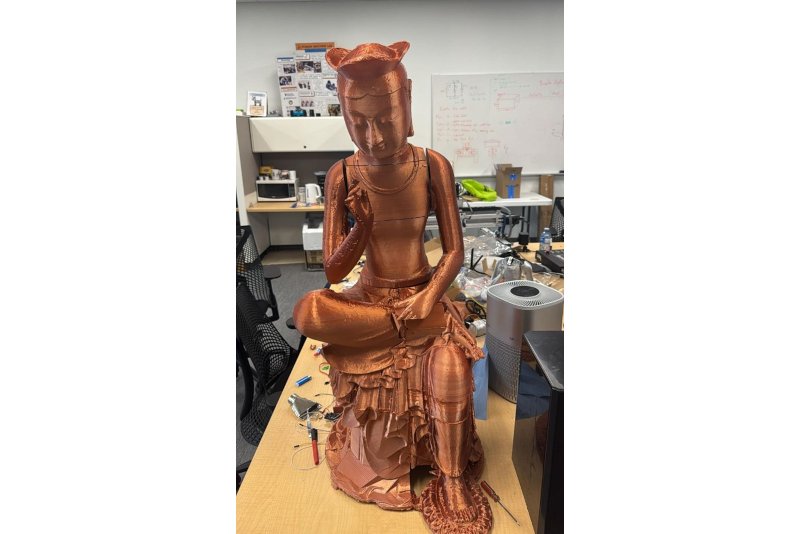
O robô, ainda em fase de desenvolvimento, no laboratório da Universidade Federal de Lavras (foto: Marco Tulio Silva/UFLA)
José Tadeu Arantes | Agência FAPESP – Um robô social com a aparência de um bodhisattva – ente iluminado que, segundo a perspectiva budista, permanece no mundo fenomênico para ajudar outras pessoas – foi desenvolvido por pesquisadores da Universidade Federal de Lavras (UFLA), em Minas Gerais, da Ontario Tech University, no Canadá, e da Hongik University, na Coreia do Sul. Por meio de impressão 3D baseada em escaneamento digital de alta resolução, o objeto reproduz em tamanho real uma estátua budista do início do século 7 d.C., considerada “tesouro nacional” da Coreia. E é capaz de interagir com o usuário por meio de movimentos sutis de cabeça, tronco e braços, reconhecimento de gestos e fala. “Além disso, a partir de comandos, o sistema pode produzir música compatível com o estado meditativo do usuário. A música é gerada por inteligência artificial com base em cânones budistas”, diz André de Lima Salgado, professor do Departamento de Ciência da Computação da UFLA e coordenador da equipe brasileira.
O trabalho foi publicado nos anais da 2025 IEEE International Conference on Collaborative Advances in Software and Computing (Cascon), realizada em Toronto, no Canadá.
O modelo foi desenvolvido como prova de conceito de uma nova geração de sistemas de interação humano-robô culturalmente situados. “O objetivo central foi demonstrar como grandes modelos de linguagem, aliados à inteligência artificial multimodal e à arquitetura modular, podem sustentar interações socialmente significativas entre humanos e máquinas em ambientes culturais e espirituais”, afirma Salgado.
A ideia de robôs capazes de interação social vem sendo explorada há cerca de 15 anos. Mas poucos estudos haviam investigado sistemas robóticos projetados deliberadamente para assumir características simbólicas em contextos místico-filosóficos ou religiosos. Esses dispositivos diferem de humanoides tradicionais porque não tentam imitar pessoas, mas representar figuras espirituais, incorporando elementos iconográficos, vestimentas e sequências de comportamento ritual – o que exige cuidados culturais e éticos específicos.
“Atendendo à demanda dos coreanos, nós procuramos reproduzir, com a máxima exatidão, o formato da escultura rotulada como ‘Tesouro Nacional nº 83’. O modelo foi dividido em módulos estruturais, permitindo montagem rápida e instalação de componentes internos. Motores controlados por microcontroladores possibilitam que o objeto se movimente”, informa Salgado.
O robô tem 93 centímetros de altura e permanece sentado, como a escultura original. Um detalhe importante é sua capacidade de reconhecer gestos simbólicos (mudrās) feitos pelas pessoas que interagem com ele. Quanto a isso, os pesquisadores tiveram que ser especialmente cuidadosos, porque os mudrās têm formatos muito específicos e precisos nas tradições hinduístas e budistas. Uma pequena variação pode transmitir um conteúdo completamente diferente. O reconhecimento de um gesto muito conhecido, como abhaya mudrā (feito com a mão erguida e espalmada, como símbolo de destemor, proteção e bênção), foi bem-sucedido em 75% dos casos.
“O sistema foi estruturado segundo o paradigma sense-think-act [perceber-pensar-agir]. Nesse modelo, cada comportamento é implementado como um nó independente, capaz de receber dados, processá-los e gerar ações. Essa abordagem descentralizada permite que os módulos deleguem tarefas entre si por meio de um protocolo de comunicação, aumentando a escalabilidade e a robustez do sistema”, afirma Salgado. Os pesquisadores observaram que arquiteturas centralizadas tendem a ser frágeis e difíceis de expandir, enquanto redes de módulos autônomos possibilitam comportamentos mais complexos e adaptáveis.
O robô utiliza um modelo de linguagem de máquina leve, executado localmente por meio de um notebook acoplado ao sistema. Em vez de acessar servidores externos, todo o processamento ocorre off-line, após treinamento prévio em infraestrutura de maior capacidade. “Nós partimos de um modelo pequeno e fizemos a especialização dele a partir de um dataset que o pessoal da Coreia nos ajudou a construir”, detalha o pesquisador.
Outra inovação foi o uso de um modelo CLIP [rede neural multimodal que aprende a associar imagens a textos, permitindo reconhecê-las, classificá-las ou descrevê-las] ajustado às imagens com elementos da iconografia budista – templos, animais simbólicos etc. “Os resultados mostraram desempenho elevado na identificação visual de símbolos culturalmente relevantes, alcançando 85,64% de acerto para arquitetura e 85,06% para animais associados ao contexto religioso”, relata Salgado.
Embora o projeto tenha sido concebido para enriquecer a experiência de visitantes em museus coreanos, os pesquisadores vislumbram aplicações da tecnologia em outras áreas. Uma linha futura envolve robôs sociais capazes de oferecer apoio emocional a agricultores, grupo em que estudos apontam altos níveis de estresse e isolamento social.
O protótipo sugere que robótica social, inteligência artificial e patrimônio cultural podem convergir para formar uma nova categoria de interfaces – sistemas capazes não apenas de executar tarefas, mas de interagir simbolicamente com humanos. A próxima etapa do projeto prevê estudos longitudinais em ambientes reais para medir confiança, engajamento e impacto psicológico nos usuários.
O estudo recebeu apoio da FAPESP por meio do Projeto Temático “Da semente à xícara: internet das coisas na cadeia produtiva de cafés de qualidade”, ao qual Salgado está vinculado como pesquisador associado.
O artigo Towards a small behavioral model (SBM) for theomorphic robots pode ser lido em: ieeexplore.ieee.org/document/11344139.
Fonte ==> Folha SP







